Hongbo Zhang
I am a third-year Ph.D. candidate in the Department of Mechanical and Automation Engineering at The Chinese University of Hong Kong (CUHK). As a member of the Legged Robot Lab (CUHKLRL), I work under the supervision of Professor Yunhui Liu. My research focuses on developing advanced control strategies for legged robots through reinforcement learning approaches. I am particularly interested in bridging the gap between theoretical robotics and practical applications, working to create more robust and adaptable control systems for complex robotic platforms.
Before joining CUHK, I received my B.E. degree in 2022 at Zhejiang University in Automation and Control.
My current research interests focus on robot learning, including:
- Optimal Control and Reinforcement Learning
- Safety Critical Learning
- Legged System (Hoppers, Quadrupeds and Bipedals) Locomotion and Manipulation
Publications
* equal contribution
2025

Traversability-Aware Legged Navigation by Learning from Real-World Visual Data
Hongbo Zhang, Zhongyu Li, Xuanqi Zeng, Laura Smith, Kyle Stachowicz, Dhruv Shah, Linzhu Yue, Zhitao Song, Weipeng Xia, Sergey Levine, Koushil Sreenath, Yun-hui Liu
IEEE Transaction on Robotics (2025)
This work develops a hierarchical RGBD-based traversability-aware navigation-locomotion framework using reinforcement learning.
paper youtube 
Learning to Hop for a Single-Legged Robot with Parallel Mechanism
Hongbo Zhang*, Xiangyu Chu*, Yanlin Chen, Yunxi Tang, Linzhu Yue, Yun-Hui Liu, and Kwok Wai Samuel Au
Under Review (2025)
This work presents the application of reinforcement learning to improve the performance of a highly dynamic hopping system with a parallel mechanism.
paper 
Online Omnidirectional Jumping Trajectory Planning for Quadrupedal Robots on Uneven Terrains
Linzhu Yue, Zhitao Song, Jinhu Dong, Zhongyu Li, Hongbo Zhang, Lingwei Zhang, Xuanqi Zeng, Koushil Sreenath, Yun-hui Liu
Under Review (2025)
This paper proposes a general and complete cascade online optimization framework for omnidirectional jumping for quadruped robots.
paper youtube 2024
Genloco: Generalized locomotion controllers for quadrupedal robots
Gilbert Feng*, Hongbo Zhang*, Zhongyu Li, Xue Bin Peng, Bhuvan Basireddy, Linzhu Yue, Zhitao Song, Lizhi Yang, Yunhui Liu, Koushil Sreenath, Sergey Levine
Conference on Robot Learning (CoRL), 2022
We show that by training a controller on this large set of simulated robots, our models acquire more general control strategies that can be directly transferred to novel simulated and real-world robots with diverse morphologies.
paper code youtube 
Adaptive Model Predictive Control with Data-driven Error Model for Quadrupedal Locomotion
Xuanqi Zeng, Hongbo Zhang, Linzhu Yue, Zhitao Song, Lingwei Zhang, Yun-Hui Liu
International Conference on Robotics and Automation (ICRA), 2024
We propose the controller of integrating a data-driven error model into traditional MPC for quadruped robots.
paper youtube 
A Fast Online Omnidirectional Quadrupedal Jumping Framework Via Virtual-Model Control and Minimum Jerk Trajectory Generation
Linzhu Yue, Lingwei Zhang, Zhitao Song, Hongbo Zhang, Jinhu Dong, Xuanqi Zeng, Yun-Hui Liu
International Conference on Intelligent Robots and Systems (IROS), 2024
We propose an omnidirectional jumping framework that generates and tracks aerial motions for quadrupedal robots
paper youtube 2023
Evolutionary-Based Online Motion Planning Framework for Quadruped Robot Jumping
Linzhu Yue, Zhitao Song, Hongbo Zhang, Xuanqi Zeng, Lingwei Zhang, Yun-Hui Liu
International Conference on Intelligent Robots and Systems (IROS), 2023
We propose a time-friendly online motion planning framework for quadruped jumping based on the meta-heuristic Differential evolution algorithm.
paper youtube 2022
The cooperative control of heterogeneous multi-agent systems
Hongbo Zhang
Bachelor Thesis (2022), Best Thesis Award
We propose a distributed formation framework for heterogeneous multi-agent systems with a Laplace-Matrix-based controller.
paper code 2021
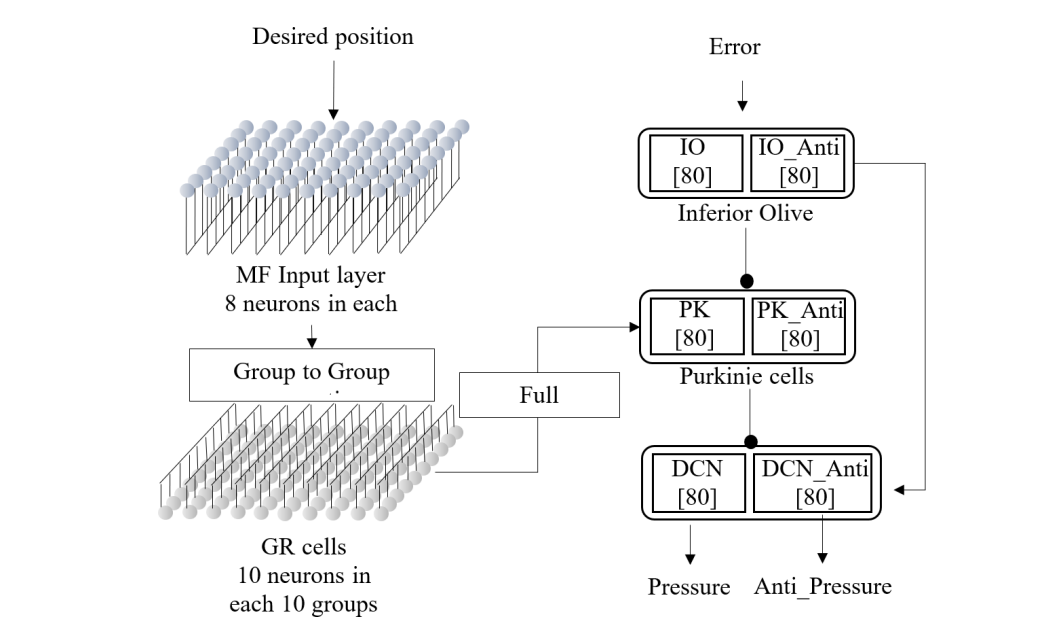
Control of Pneumatic Artificial Muscles with SNN-based Cerebellar-Like Model
Hongbo Zhang*, Yunshuang Li*, Yipin Guo*, Xinyi Chen, Qinyuan Ren
International Conference on Social Robotics (ICSR), 2021
A neural network model of Cerebellum based on spiking neuron networks (SNNs) is designed to control a 1-DOF robot arm driven by Pneumatic artificial muscles (PAMs).
paper 